
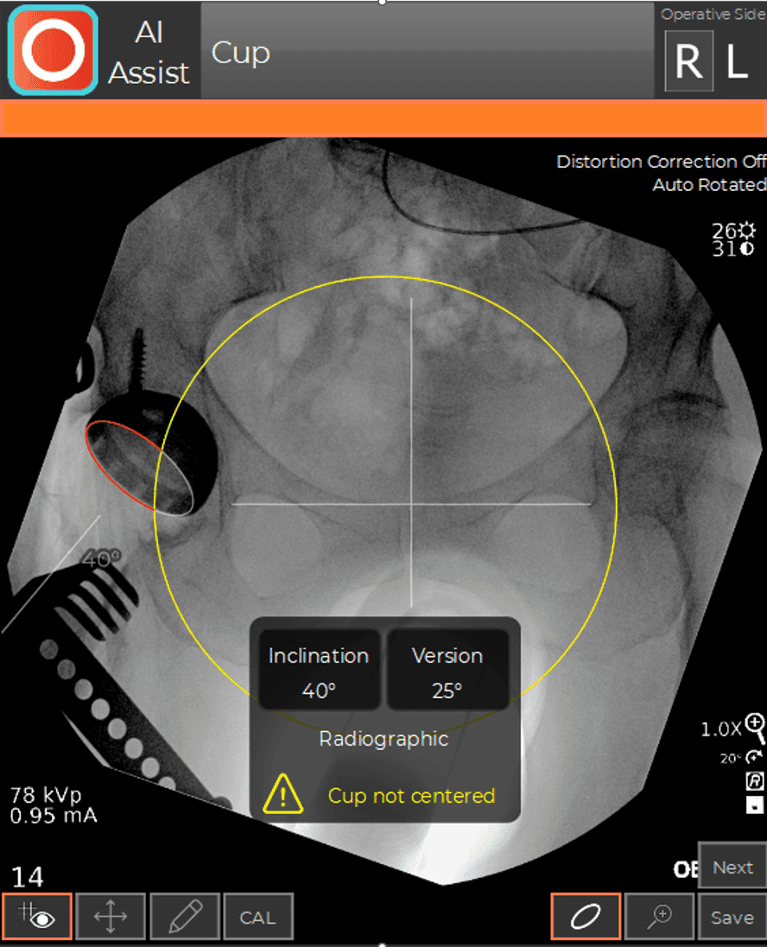
Artificial Intelligence Computer Navigation: Cup Position
Accurate cup positioning is vital for a well-functioning total hip replacement. Taking into account the individual characteristics of the patient's acetabular anatomy, spinal stiffness, deformity, and pelvic tilt, the surgeon aims to place the cup within a narrow range of inclination and anteversion values. Artificial intelligence software is used to monitor the patient's cup position in real-time during the surgery, ensuring that the component is precisely implanted into the "safe zone" of inclination and anteversion designated by the pre-operative plan.
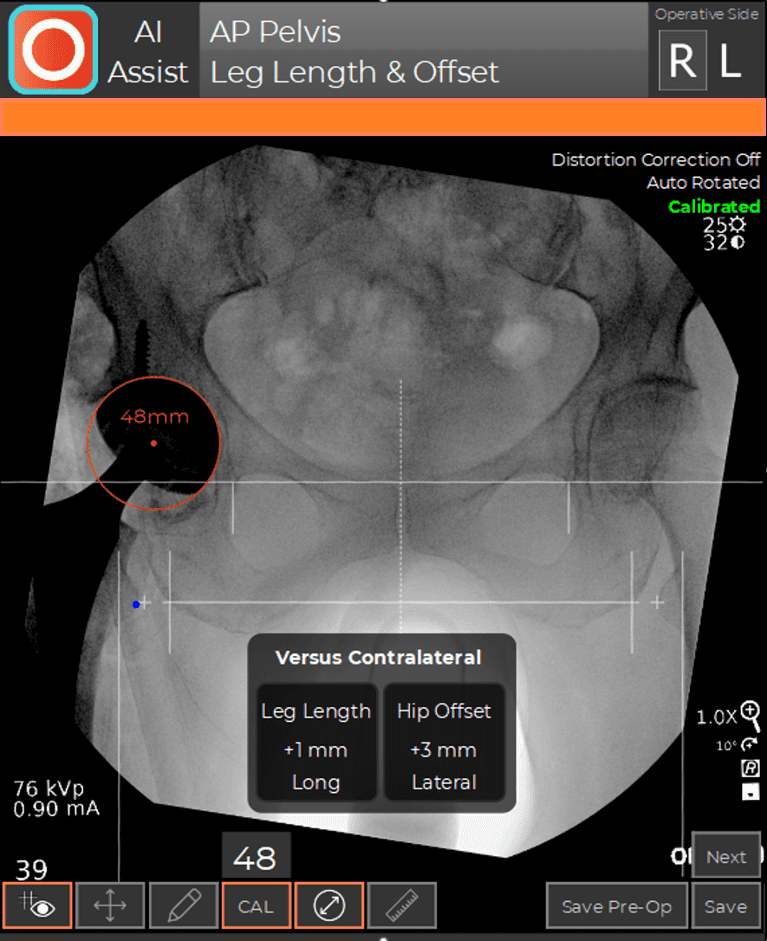
Artificial Intelligence Computer Navigation: Leg Length and Offset
Reproduction of normal hip biomechanics is a vital part of placing the femoral stem. Using artificial intelligence software, the patient's leg length and hip offset can be precisely monitored in real-time during the procedure, allowing the surgeon to make accurate decisions about final component placement and to achieve the desired result for that patient's anatomy.

Automated Impaction
Historically, insertion of hip and knee implants into the patient's bone has been performed by the manual use of a mallet and impactor. While effective, manual impaction introduces a substantial degree of variability into the procedure, because the force, vector, and cadence of mallet strikes depend upon the surgeon swinging the mallet. The advent of automated impaction has now standardized these variables, delivering a consistent and controlled impaction force that leads to more safe and predictable seating of the implant. Moreover, the combination of automated impaction and A.I. computer navigation allows the surgeon to "dial in" the cup and stem position in real-time with a tremendous level of accuracy and precision.
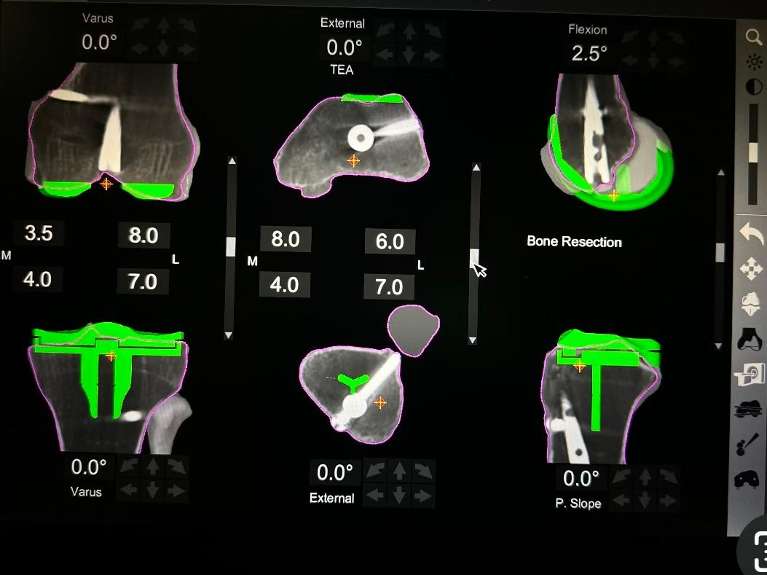
Robotic-Assisted and Computer-Navigated Knee Replacement
Historically, bone cuts during total and partial knee replacement have been made using manual alignment jigs. This requires the surgeon to use bony landmarks and their own experience to make the series of bony cuts required for implant insertion. While effective, performing these cuts manually does introduce a certain degree of variability into the procedure due to surgeon, patient, or implant-related factors. The use of robotics and computer navigation reduces this variability, and improves the surgeon's ability to place implants with a high degree of accuracy. Multiple points of reference using the patient's own anatomy are registered into the computer, and the implants can be modeled virtually onto a 3D reconstruction of the patient's bone. When the final plan is executed, the implant is then positioned to restore the patient's native anatomy and promote optimal soft tissue balance.